| Poder |
Voltaje |
frecuencia monofásica 0~110V, 0~220V, 50 / 60Hz, trifásica 0~440V 50 / 60Hz |
| Fluctuación permitida |
voltaje: ± 15%, frecuencia: ± 5% |
| Rango de frecuencia |
0-999.9Hz |
| Control de rendimiento |
Precisión de frecuencia de salida |
Valor de frecuencia máxima ± 0,1% |
| Resolución de frecuencia de salida |
Función de las teclas superior e inferior del teclado: 0.01Hz
Entrada analógica del potenciómetro: 0.2Hz |
| Control V/F |
Curva V/F (característica de frecuencia de voltaje) |
Tres formas: la primera es la curva característica de par lineal, la segunda es la curva característica de par cuadrado y la tercera es la curva V/F establecida por el usuario |
| Aumento de par |
Ajuste manual: 0.0 ∼ 30.0% de la salida nominal |
| Elevación automática: determina automáticamente el par de refuerzo según la corriente de salida y los parámetros del motor |
| Limitación automática de corriente y voltaje |
Ya sea en aceleración, desaceleración u operación estable, la corriente y el voltaje del estator del motor se pueden detectar automáticamente, lo que se puede suprimir dentro del rango permitido según el algoritmo único para minimizar la posibilidad de disparo por falla del sistema |
| Control vectorial sin sensores |
Característica de frecuencia de voltaje |
Ajuste automático de la relación de voltaje de salida-frecuencia según a parámetros del motor y algoritmo único |
| Característica de par |
Par de arranque:
100 % de par nominal a (control VF)
150 % de par nominal a 0,5 Hz (control vectorial) |
| Supresión de corriente y voltaje |
Control de bucle cerrado de corriente de rango completo, evitando por completo el impacto de la corriente, con función perfecta de supresión de sobrecorriente y sobrevoltaje |
| Supresión de subvoltaje durante el funcionamiento |
Especialmente para usuarios con bajo voltaje de red y fluctuación frecuente del voltaje de red, el sistema puede mantener el mayor tiempo de funcionamiento posible de acuerdo con el algoritmo único y la estrategia de asignación de energía residual incluso en el rango por debajo del voltaje permitido |
| Operación de velocidad de varias etapas |
El control de velocidad de varias etapas programable de 7 etapas y los modos de funcionamiento múltiples son opcionales. |
| Funciones típicas |
Control PID |
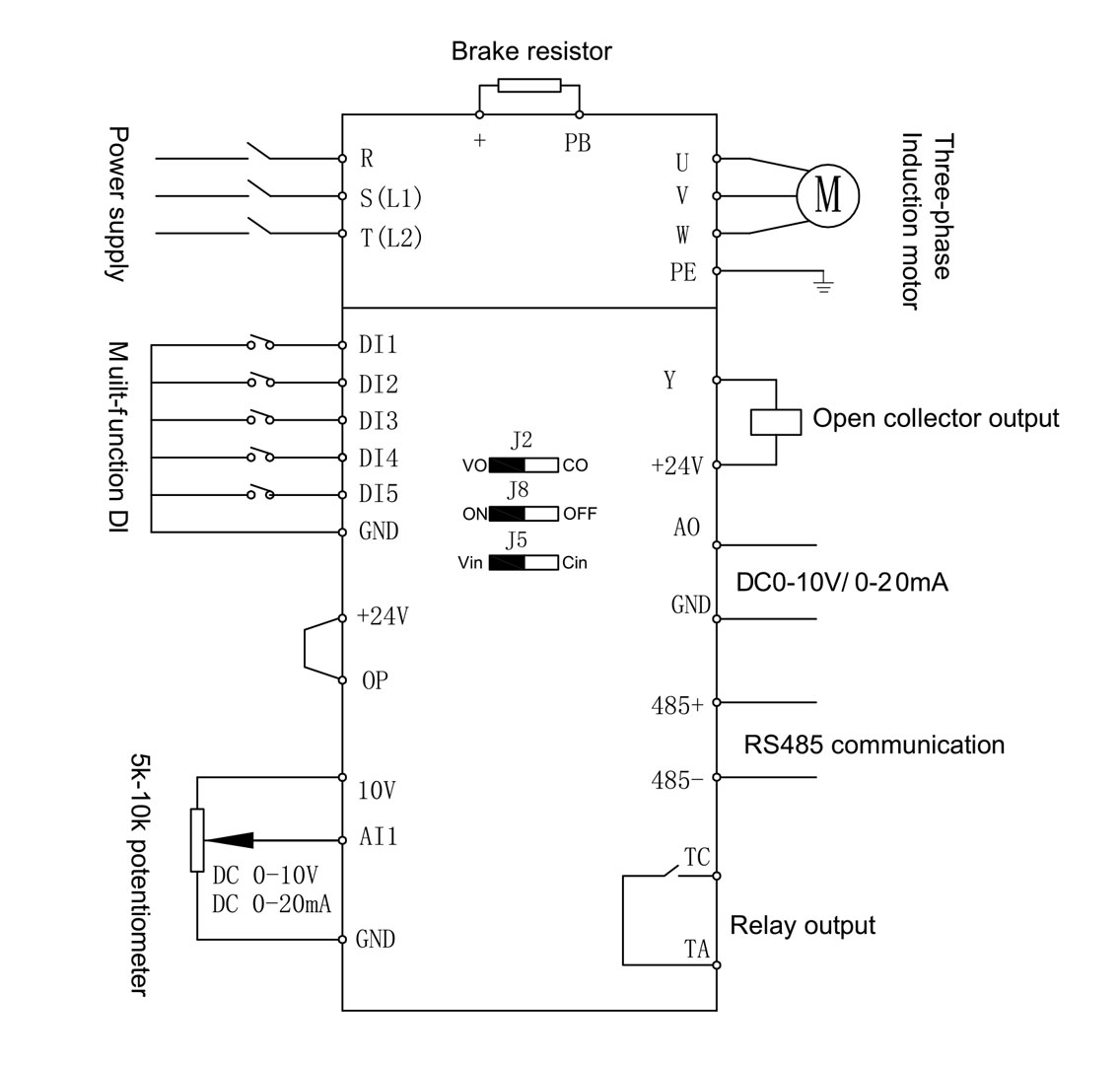
Controlador PID integrado (frecuencia preestablecida). Función de comunicación RS485 de configuración estándar, se pueden seleccionar múltiples protocolos de comunicación, con función de control sincrónico de enlace |
| Configuración de frecuencia |
Entrada analógica |
Voltaje CC 0 ∼ 10 V, corriente CC 0 ∼ 20 mA (los límites superior e inferior son opcionales) |
| Entrada digital |
También se pueden realizar configuraciones del panel de operación, configuración de la interfaz RS485, configuración del terminal UP/DW y varias configuraciones combinadas con entrada analógica. |
| Señal de salida |
Salida digital |
1 salida OC y 1 salida de relé (TA, TC), con hasta 17 funciones |
| Salida analógica |
1 AO, el rango de salida se puede configurar de manera flexible entre 0 ∼ 20 mA o 0 ∼ 10 V,que puede realizar la salida como la frecuencia establecida y la frecuencia de salida, etc. |
| Operación de estabilización de voltaje automática |
Según las necesidades, se pueden seleccionar tres modos: estabilización de voltaje dinámico, estabilización de voltaje estático y estabilización sin voltaje, para obtener el efecto de operación más estable |
| Ajuste del tiempo de aceleración/desaceleración |
Se puede configurar de forma continua de 0,1 s a 999,9 min |
| Freno |
Consumo de energía al frenar |
El voltaje de arranque del consumo de energía en el frenado, la diferencia de voltaje de retorno y la tasa de consumo de energía en el frenado se pueden ajustar de forma continua |
| Freno de CC |
Frecuencia de inicio del frenado de CC durante la parada: 0,00 ~ [00,05] frecuencia límite superior
Tiempo de frenado: 0,0 ∼ 30,0 s; Corriente de frenado: 0,0 % ∼ 50,0 % del voltaje nominal del motor |
| Operación con bajo nivel de ruido |
La frecuencia portadora se puede ajustar continuamente de 2,0 kHz a 20,0 kHz para minimizar el ruido del motor |
| Contador |
Un contador interno es conveniente para la integración del sistema |
| Función de operación |
Configuración de frecuencia límite superior e inferior, operación de salto de frecuencia, límite de operación inversa, compensación de frecuencia de deslizamiento, comunicación RS485, control de incremento y decremento de frecuencia, operación de recuperación automática de fallas, etc. |
| Pantalla |
Estado de funcionamiento |
Frecuencia de salida, corriente de salida, voltaje de salida, velocidad del motor, frecuencia establecida, temperatura del módulo, configuración de PID, retroalimentación de PID, entrada y salida analógica, etc. |
| Contenido de la alarma |
Registre una serie de parámetros operativos como frecuencia de salida, frecuencia establecida, corriente de salida, voltaje de salida, voltaje de CC y temperatura del módulo durante la última falla |
| Función de protección |
Sobrecorriente, sobretensión, subtensión, fallo del módulo, relé térmico electrónico, sobrecalentamiento, cortocircuito, fallo de la memoria interna, etc. |
| Entorno |
Temperatura ambiente |
-10°C ∼ +40°C (cuando la temperatura ambiente sea de 40°C ∼ 50°C, utilícelo a un nivel reducido) |
| Humedad ambiente |
R5% ∼ 95% HR, sin condensación de agua |
| Entorno circundante |
Interior (sin luz solar directa, corrosión, gases inflamables, neblina de aceite, polvo, etc.) |
| Altitud |
Reducción de potencia para uso por encima de los 1000 metros, cada 1000 metros en adelante reducción de potencia del 10% |
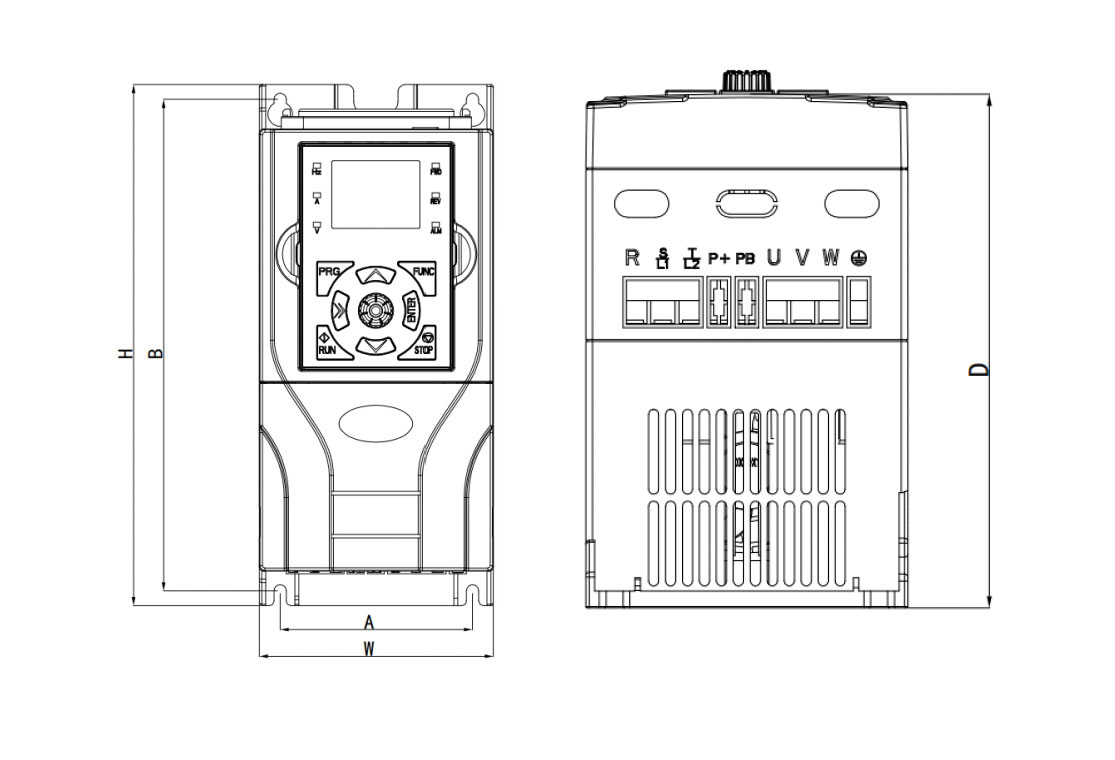
| Estructura |
Grado de protección |
IP20 |
| Modo de refrigeración |
Refrigeración por aire con control de ventilador |